Choisissez des lecteurs





Statistiques populaires
Kolom Le point du plan qui est à égale distance de ce point est appelé le centre.
Puisque le point C est le centre du piquet, R est le rayon et M est le point suffisant du piquet, alors le piquet
Jalousie (1) є Pieu Rivnyannaya rayon R à partir du centre au point C.
Soit le plan un système de coordonnées cartésiennes rectangulaires (Fig. 104) et le point C( UN; b) - Centre du piquet de rayon R. Nekhai M( X; à) - le point suffisant de cet enjeu.
Oskolki |SM| = \(\sqrt((x - a)^2 + (y - b)^2) \), alors l'équation (1) peut s'écrire comme suit :
\(\sqrt((x - a)^2 + (y - b)^2) \) = R
(x-a) 2 + (y-b) 2 = R 2 (2)
Rivnyannya (2) appel au pieu de Zagalnym Rivnyany soit aux rangs d'un piquet de rayon R centré au point ( UN; b). Par exemple, la jalousie
(X - l) 2 + ( oui + 3) 2 = 25
Il existe un piquet de niveau de rayon R = 5 centré au point (1 ; -3).
Lorsque le centre du piquet se rapproche du grain de coordonnées, alors l'alignement (2) apparaît
X 2 + à 2 = R2. (3)
Rivnyannya (3) appel dirigeants canoniques du pieu .
Zavdannya 1.Écrivez le niveau du rayon R = 7 avec le centre sur les coordonnées.
La substitution sans centre de la valeur du rayon dans le niveau (3) est supprimée
X 2 + à 2 = 49.
Zavdannya 2.Écrivez une ligne de rayon R = 9 centrée au point C (3, -6).
Après avoir substitué les valeurs des coordonnées du point C et les valeurs du rayon dans la formule (2), on peut supprimer
(X - 3) 2 + (à- (-6)) 2 = 81 ou ( X - 3) 2 + (à + 6) 2 = 81.
Zavdannya 3. Trouver le centre et le rayon du piquet
(X + 3) 2 + (à-5) 2 =100.
Uniformément Dana Rivnyanna Iz zagalnym rivnyanyam kola (2), bachimo, scho UN = -3, b= 5, R = 10. Alternativement, C(-3; 5), R = 10.
Zavdannya 4. Apportez cette jalousie
X 2 + à 2 + 4X - 2oui - 4 = 0
є aux rangs du pieu. Découvrez le centre et le rayon.
Réconcilions la partie gauche de cette jalousie :
X 2 + 4X + 4- 4 + à 2 - 2à +1-1-4 = 0
(X + 2) 2 + (à - 1) 2 = 9.
Le centre est le centre du cercle au point (-2 ; 1) ; Le rayon du piquet est supérieur à 3.
Zavdannya 5.Écrivez une droite centrée au point C(-1; -1), qui est une droite AB, telle que A (2; -1), B(- 1; 3).
Écrivons directement AB :
![]() ou 4 X + 3oui-5 = 0.
ou 4 X + 3oui-5 = 0.
Les fragments entrent en collision avec cette droite, alors le rayon de passage jusqu'au point de torsion est perpendiculaire à cette droite. Pour déterminer le rayon, vous devez connaître la distance du point C(-1; -1) - le centre du piquet à la droite 4 X + 3oui-5 = 0:
Écrivons le rivetage du pieu shukana
(X +1) 2 + (oui +1) 2 = 144 / 25
Passons au système de coordonnées rectangulaires X 2 + à 2 = R2. Jetons un coup d'oeil au point suffisant M( X; à) (Fig. 105).

Allons-y rayon vecteur OM> le point M crée une coupure de magnitude t avec axe direct positif X, alors l'abscise et l'ordonnée du point M changent de position de t
(0 t x et y passant par t, nous savons
X= Rcos t ; oui= R péché t , 0 t
Rivnyannya (4) sont appelés alignements paramétriques d'un piquet avec un centre en épi de coordonnées.
Zavdannya 6. Le cercle est donné par les lignes
X= \(\sqrt(3)\)cos t, oui= \(\sqrt(3)\)péché t, 0 t
Enregistrez le rang canonique de ce pieu.
Mon esprit vibre X 2 = 3 parce que 2 t, à 2 = 3 péché 2 t. Ajout d'égalités, terme par terme, amovible
X 2 + à 2 = 3 (cos 2 t+ péché 2 t)
ou sinon X 2 + à 2 = 3
Nous vous présentons le service à triple fonctions graphiques en ligne, tous droits réservés par la société Desmos. Pour saisir une fonction, utilisez la colonne de gauche. Vous pouvez le saisir manuellement ou utiliser le clavier virtuel en bas de la fenêtre. Pour améliorer la vue avec le graphique, vous pouvez ajouter à la fois la colonne de gauche et le clavier virtuel.
Nous pouvons facilement vous fournir en ligne des graphiques de complexité variable. Pobudova se perd à Mitvo. Service de demande pour trouver le point de transfert des fonctions, des images de graphiques pour leur déplacement ultérieur dans un document Word comme illustration de la tâche en cours, pour analyser les caractéristiques comportementales des graphiques de fonctions. Le navigateur optimal pour travailler avec des graphiques sur cette page Google Chrome. Dans le cas d'autres navigateurs, l'exactitude du robot n'est pas garantie.
Valeur 1. Numériquement tout ( droite numérique, droite de coordonnées) Ox est la droite où se trouve le point O épi de l'épi (épi de coordonnées)(Fig. 1), directement
Ô → X
indiqué comme direction positive et le cut-off est indiqué, dont le bas est accepté comme dovjini un.
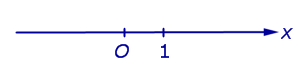

Valeur 2. Une coupe dans laquelle un dovjine est considéré comme un dovjine est appelée une écaille.
Le point cutané sur l'axe numérique est la coordonnée qui est le numéro de parole. La coordonnée du point O est égale à zéro. La coordonnée du point précédent A, qui se trouve sur le central Ox, est la même que la section précédente OA. La coordonnée du point suffisant A de l'axe numérique qui ne se trouve pas sur l'échange Ox est négative, et en valeur absolue, l'ancienne section dovzhiny d'OA.
Valeur 3. Système de coordonnées cartésiennes rectangulaires Oxy sur un plan appeler deux noms ensemble perpendiculaire axes numériques Ox et Oy mais à une échelle différenteі avec un épi d'épi au point O d'ailleurs, de telle sorte que le virage du central Ox au virage 90° vers le central Oy se fasse tout droit contre la direction de la flèche d'anniversaire(Fig.2).


Respect. Le système de coordonnées cartésiennes rectangulaires Oxy, représenté par baby 2, est appelé système de coordonnées droit, à l'administration systèmes de coordonnées gauche, Lorsque vous tournez Ox vers le coin 90° avant de changer Oy, il se déplace tout droit dans le sens de la flèche de l'année. De qui avons-nous le témoin ? vu depuis le système de coordonnées de droite, sans rien discuter de particulier.
Comment introduire les yakus en plaine système de coordonnées cartésiennes rectilignes Oxy, alors le point peau du plan augmente deux coordonnées – abscisі ordonnée, qui sont comptés avec un tel rang. Soit A le point suffisant du plan. Déposons les perpendiculaires du point A Les AA 1 je Les AA 2 sur la droite Ox et Oy en ligne (Fig. 3).
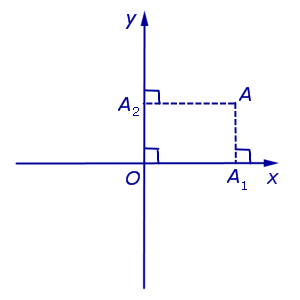

Valeur 4. L'abscisse du point A est la coordonnée du point UN 1 sur l'axe numérique Ox, l'ordonnée du point A est la coordonnée du point UN 2 sur l'axe numérique Oy.
Rendez-vous. Coordonnées (abscies et ordonnées) du point A pour le système de coordonnées cartésiennes rectangulaires Oxy (Fig. 4) a la valeur acceptée UN(X;oui) ou sinon UN = (X; oui).


Respect. Point O, appelé épi de coordonnées, coordonnées de mai Ô(0 ; 0) .
Vicence 5. Dans le système de coordonnées cartésiennes rectangulaires Oxy, le tout numérique Ox est appelé abscis entier et le tout numérique Oy est appelé ordonnée entière (Fig. 5).
Vicence 6. La peau possède un système de coordonnées cartésiennes rectangulaires divisant la zone en 4 quarts (quadrants) dont la numérotation est indiquée en petit 5.
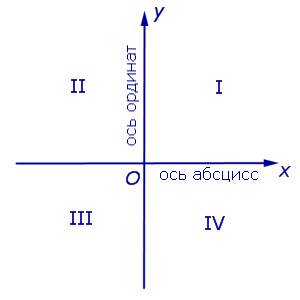

Vicence 7. La zone sur laquelle un système de coordonnées cartésiennes rectangulaires est spécifié est appelée avion coordonné.
Respect. L'abscisse entière est indiquée sur le plan de coordonnées des niveaux oui= 0 , l'ordonnée entière est précisée sur le plan de coordonnées des niveaux X = 0.
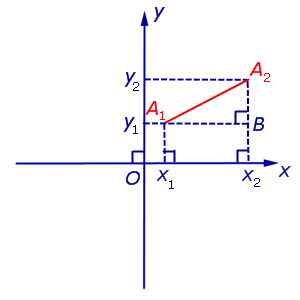
Tverjéninie 1. Se tenir entre deux points avion coordonné
UN 1 (X 1 ;oui 1) і UN 2 (X 2 ;oui 2)
être calculé derrière la formule
Fini. Regardons la figure 6.

| Statistiques sur le sujet : | |
|
Alertes printanières pour les enfants
Printemps! C'est l'heure du rock ! Tout s'ouvre, tout reprend vie après l'hiver... Cuisses de poulet cuites avec des pommes de terre au four, sous une croûte croustillante, sur la manche, en papier d'aluminium, avec du fromage Cuire des cuisses de poulet avec des pommes de terre dans un sachet
Il semble que vous n'ayez pas assez de temps pour laisser le garde-manger sur le feu pendant longtemps, et votre famille a besoin... Académie financière de la Fédération de Russie
L'Université de l'Ordre de la Fédération de Russie" vérifie sans délai... | |




